Address
304 North Cardinal St.
Dorchester Center, MA 02124
Work Hours
Monday to Friday: 7AM - 7PM
Weekend: 10AM - 5PM
Address
304 North Cardinal St.
Dorchester Center, MA 02124
Work Hours
Monday to Friday: 7AM - 7PM
Weekend: 10AM - 5PM

团队负责人:张克华
研究内容:智能移动机器人设计开发。
团队成员:虞付进、马利红、葛希逛、严志博、王妍、王灵、吴林仝、臧秋宇、刘进步
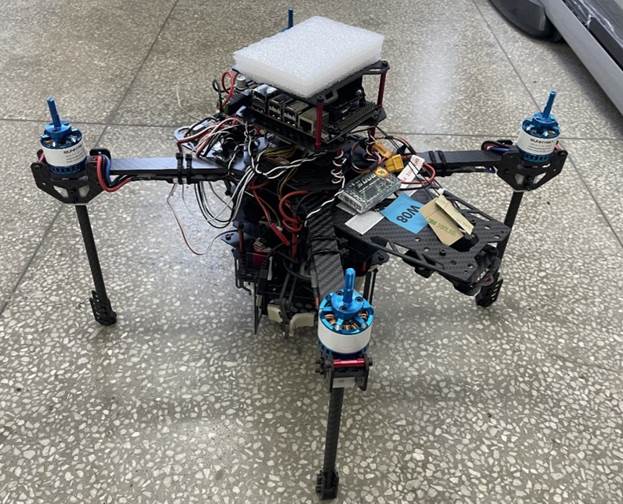
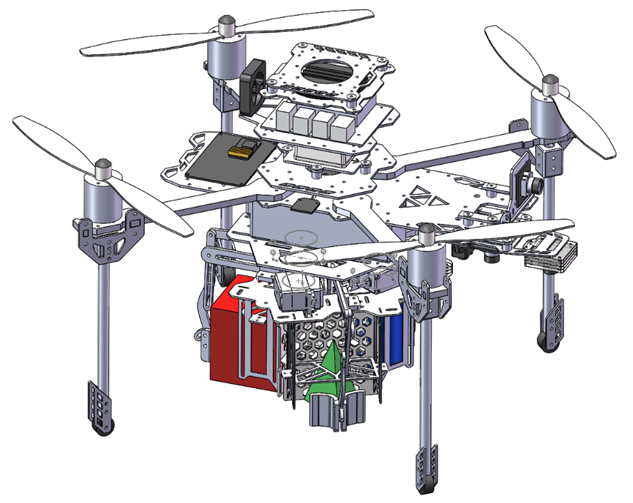
前期研究成果:ROS无人机控制系统开发
基于ROS机器人操作系统,拥有激光雷达、高帧率单目相机和双目相机,可实现自主定位与环境感知,搭载深度学习与人工智能技术的无人机平台,它的特色在于可以在不依赖GPS的情况下,依靠视觉和激光雷达以及IMU确定自身位置,并对指定目标进行自主路径规划,是真正意义上的自主导航与制导。